The frequency response method may be less intuitive than other methods. However, it has certain advantages, especially in real-life situations such as modeling transfer functions from physical data. The frequency response of a system can be viewed two different ways: via the Bode plot or via the Nyquist diagram. Both methods display the same information; the difference lies in the way the information is presented.

To plot the frequency response, it is necessary to create a vector of frequencies (varying between zero (DC) and infinity) and compute the value of the system transfer function at those frequencies. If G(s) is the open loop transfer function of a system and ω is the frequency vector, we then plot G(j.ω) vs. ω. Since G(j.ω) is a complex number, we can plot both its magnitude and phase (the Bode plot) or its position in the complex plane (the Nyquist plot). Harmonic response methods can be completed using algebraic manipulation and can also be completed by testing actual systems..
|
Frequency Response Theory Using Laplace Transfer Functions
Consider a basic open loop transfer function..

The system response to a sinusoidal input is considered by providing an input signal = a. sin(ω t)

G( jω) and G(-jω) are complex values of the Open loop transfer function with s replaced by jω.

M the Magnification factor (Magnitude ratio) =y(t) / r(t). This is a function of the frequency ω.
The frequency of y(t) is the same as (r(t) but the phase is advanced by α.

The response includes a transient response (complimentary function) and a steady state (forced) response(particular integral). In frequency response analysis only the steady state response needs to be considered. The system is linear and the output will thus be sinusoidal at a frequency ω.

If G (j ω ) = -1 ( unity gain at a phase shift of 180 ) it can be proved that the closed loop system with unity feedback will be unstable.

It can be proved that the value of ω for a value of |G(jω)| = 1 =
![]()
Phase difference between input and output =

The Nyquist plot is simply a plot of G(jω) on an argand diagram for a range of frequencies from
Frequency Response Systems Characteristics
In closed loop system , if at some frequency the signal undergoes no change in amplitude but is shifted in phase by 180 deg. ( π ) the system will be unstable. The feedback signal arriving at the summing point will reinforce the input signal and the progressive cumulative input will result in a theoretically infinite output. The feedback signal will be effectively a 100% positive feedback..
It can be therefore concluded that in the open loop version of the above system if the signal is modified resulting in unity amplitude change and a change in a phase shift of π then the system will be unstable..
In an open loop positioning control system a D.C. test signal (ω = 0) will result in the drive running continuously resulting in the output position increasing without limit. A high frequency input signal would produce zero output because the inertia of system would prevent oscillatory movement.
http://www.roymech.co.uk/Related/Control/Frequency_Response.html
Frequency Response as a Ratio of DTFTs
From Eq.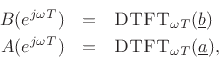
![\begin{eqnarray*}
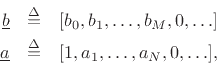
{\underline{b}}&\isdef & [b_0,b_1,\ldots,b_M,0,\ldots]\\
{\underline{a}}&\isdef & [1,a_1,\ldots,a_N,0,\ldots],
\end{eqnarray*}](https://ccrma.stanford.edu/~jos/filters/img855.png)
From the above relations, we may express the frequency response of any IIR filter as a ratio of two finite DTFTs:

This expression provides a convenient basis for the computation of an IIR frequency response in software, as we pursue further in the next section.
https://ccrma.stanford.edu/~jos/filters/Frequency_Response_Ratio_DTFTs.html
Group Delay
A more commonly encountered representation of filter phase response is called the group delay, defined by
For any reasonably smooth phase function, the group delay
Thus, the name ``group delay'' for
https://ccrma.stanford.edu/~jos/filters/Group_Delay.html
Publicado por Geraldine Linares /CRF
Invite your mail contacts to join your friends list with Windows Live Spaces. It's easy! Try it!
<a href="http://www.civiltech321blogspot.com>best education blog <a>
ResponderEliminar<a href="http://.civiltech321blogspot.com>best education blog <a>
ResponderEliminar